中國人工智能產(chǎn)業(yè)發(fā)展迎來標(biāo)志性進展:華為云盤古研發(fā)大模型在權(quán)威機構(gòu)組織的首批代碼大模型評估中,憑借卓越的綜合性能,榮獲最高等級評定。這一成果不僅彰顯了盤古大模型在代碼生成、理解與輔助開發(fā)領(lǐng)域的頂尖實力,更標(biāo)志著我國在人工智能賦能軟件工程、推動產(chǎn)業(yè)智能化升級方面邁出了堅實而關(guān)鍵的一步。
技術(shù)突破:從理解到生成的全面能力
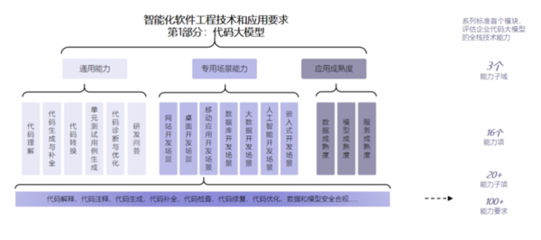
此次評估聚焦于大模型在代碼相關(guān)的核心能力。華為云盤古代碼大模型展現(xiàn)出了全方位的卓越表現(xiàn):
- 精準(zhǔn)的代碼生成:能夠根據(jù)開發(fā)者用自然語言描述的需求或函數(shù)注釋,自動生成語法正確、邏輯清晰、符合業(yè)界規(guī)范的高質(zhì)量代碼片段,甚至完整模塊,顯著提升基礎(chǔ)編碼效率。
- 深度的代碼理解與補全:在復(fù)雜的現(xiàn)有代碼庫中,能夠準(zhǔn)確理解上下文語義,智能推薦下一行或整個函數(shù)的代碼,并支持跨文件、跨模塊的關(guān)聯(lián)分析與補全,成為開發(fā)者的“超級協(xié)作者”。
- 智能的代碼審查與調(diào)試:可自動檢測代碼中的潛在錯誤、安全漏洞、性能瓶頸及不符合規(guī)范的寫法,提供修復(fù)建議,助力提升軟件質(zhì)量與安全性。
- 高效的代碼注釋與文檔生成:能夠為既有代碼自動生成清晰的技術(shù)注釋和概要文檔,改善項目可維護性,降低團隊協(xié)作成本。
這些能力的背后,是盤古大模型在超大規(guī)模代碼數(shù)據(jù)上進行預(yù)訓(xùn)練、精調(diào)以及對軟件工程領(lǐng)域知識深度吸收的技術(shù)積淀。
賦能產(chǎn)業(yè):重塑人工智能應(yīng)用軟件開發(fā)流程
通過最高等級評估,意味著盤古代碼大模型已具備在真實產(chǎn)業(yè)場景中大規(guī)模應(yīng)用、釋放生產(chǎn)力的成熟度。它將深刻改變?nèi)斯ぶ悄軕?yīng)用軟件的開發(fā)范式:
- 降低開發(fā)門檻:讓應(yīng)用開發(fā)者能夠更聚焦于業(yè)務(wù)邏輯與創(chuàng)新設(shè)計,將重復(fù)性、規(guī)范性的編碼工作交給大模型,使得AI應(yīng)用開發(fā)不再僅僅是高級算法工程師的專利。
- 加速迭代周期:從需求到代碼的轉(zhuǎn)化速度極大提升,代碼審查與測試環(huán)節(jié)得到智能化增強,從而縮短整個軟件開發(fā)生命周期,使企業(yè)能夠更快地響應(yīng)市場變化。
- 提升軟件質(zhì)量:通過智能化的代碼審查、漏洞檢測和最佳實踐推薦,從開發(fā)源頭筑牢代碼質(zhì)量與安全防線,構(gòu)建更穩(wěn)定、可靠的AI應(yīng)用。
- 激發(fā)創(chuàng)新潛能:開發(fā)者可以借助大模型快速探索和實現(xiàn)新的算法思路、架構(gòu)設(shè)計,或?qū)⒏嗑ν度氲絼?chuàng)造性的問題解決中,催生更強大、更智能的AI應(yīng)用。
生態(tài)意義:推動國產(chǎn)化AI開發(fā)工具鏈建設(shè)
華為云盤古代碼大模型取得突破性進展,其意義遠超單項技術(shù)評估。它代表了中國在AI for Software(人工智能軟件工程)這一關(guān)鍵賽道上的自主創(chuàng)新與領(lǐng)先地位。通過提供世界級的代碼輔助智能,盤古大模型正在與華為云完整的開發(fā)工具鏈、計算基礎(chǔ)設(shè)施相結(jié)合,共同構(gòu)筑國產(chǎn)化、智能化、云原生的新一代軟件開發(fā)平臺,為千行百業(yè)的數(shù)字化轉(zhuǎn)型與智能化升級提供堅實底座。
隨著代碼大模型能力的持續(xù)進化以及與開發(fā)工具的深度集成,人機協(xié)同的智能化軟件開發(fā)新時代正在加速到來。華為云盤古代碼大模型以“最高等級”的表現(xiàn)為起點,必將引領(lǐng)和推動整個AI應(yīng)用軟件開發(fā)領(lǐng)域向更高效率、更高質(zhì)量、更強創(chuàng)新的方向持續(xù)演進。